
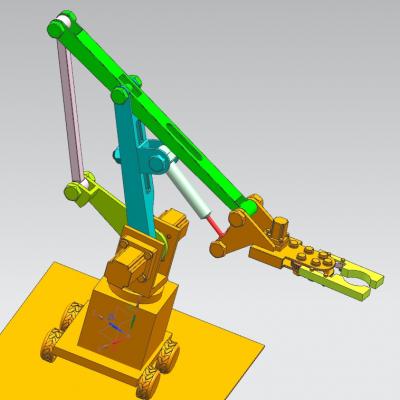
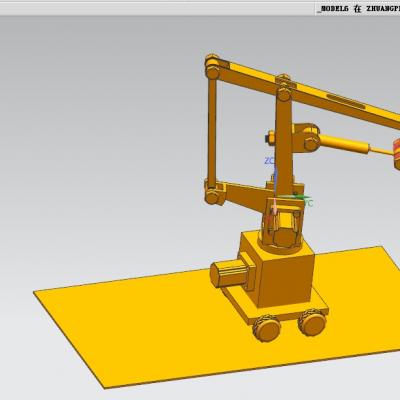
UG8.5全参数化设计的多连杆机械手结构,含独立零部件50多个。运动及夹持部分设计较为详细,采用伞齿轮连杆夹持机构,连杆部分除伺服电机还增加了气缸辅助驱动。底部移动小车建模简单,主要用于建立仿真结构。有全套装配体仿真源文件,可直接进行分析并更改系统参数。
 新闻中心 新闻中心
联系方式站内搜索 荣誉资质
友情链接
|
多连杆机械手(UG8.5全参数化设计、带仿真源格式)(UG设计,Prt格式)
2023-12-01499113.7M
UG8.5全参数化设计的多连杆机械手结构,含独立零部件50多个。运动及夹持部分设计较为详细,采用伞齿轮连杆夹持机构,连杆部分除伺服电机还增加了气缸辅助驱动。底部移动小车建模简单,主要用于建立仿真结构。有全套装配体仿真源文件,可直接进行分析并更改系统参数。 |