

移动救援机器人3D模型 SolidWorks 2014设计 有参数 sldasm﹑sldprt源文件提供,移动救援机器人采用三角履带轮运动机制,实现灵活的流动性。
 新闻中心 新闻中心
联系方式站内搜索 荣誉资质
友情链接
|
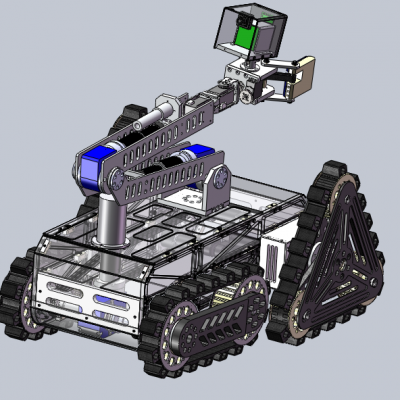
移动救援机器人(SolidWorks设计,提供Sldprt/Sldasm格式)
2024-09-243084026M
移动救援机器人3D模型 SolidWorks 2014设计 有参数 sldasm﹑sldprt源文件提供,移动救援机器人采用三角履带轮运动机制,实现灵活的流动性。 |