
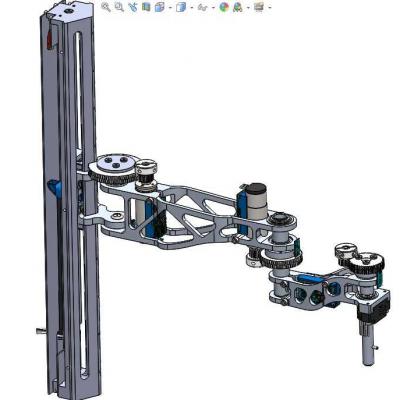
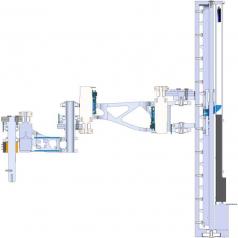
四轴机械臂(四轴机器人手臂)SW设计源文件分享,欢迎下载。
四轴机械臂包括支撑台、两相互平行设置于所述支撑台上的X轴向导轨、两相互平行且可左右滑动的分别垂直设置于所述X轴向导轨上的支撑柱、一固定于所述的两支撑柱上端的Z轴向导轨及一可前后滑动的垂直设置于所述Z轴向导轨上的Y轴向导轨。
 新闻中心 新闻中心
联系方式站内搜索 荣誉资质
友情链接
|
四轴机械臂(四轴机器人手臂)SW设计(SolidWorks设计,Sldprt/Sldasm格式)
2024-03-21296926M
四轴机械臂(四轴机器人手臂)SW设计源文件分享,欢迎下载。 |