


MH6S工业机器人,也叫机械手,机械臂,-step-iges格式文档分享。还有bip渲染文件。
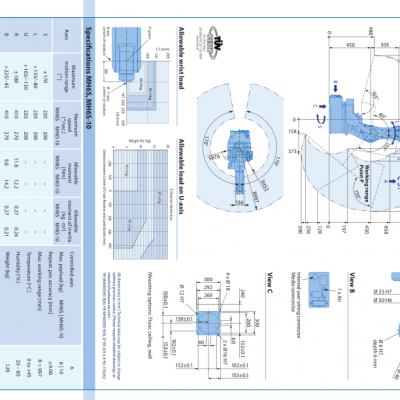
MH6S通用搬运工业机器人技术参数
型号
MH6S
控制柜
DX100
安装*1
F,W,C
自由度
6
负载
6kg
垂直伸长度
1597mm
水平伸长度
997mm
重复定位精度*2
±0.08mm
动作范围
S轴(旋转)
-170°~+170°
L轴(下臂)
-80°~+133°
U轴(上臂)
-130°~+165°
R轴(手腕旋转)
-180°~+180°
B轴(手腕摆动)
-45°~+225°
T轴(手腕回转)
-360°~+360°
最大速度
S轴(旋转)
220°/s
L轴(下臂)
220°/s
U轴(上臂)
220°/s
R轴(手腕旋转)
410°/s
B轴(手腕摆动)
410°/s
T轴(手腕回转)
610°/s
容许力矩
R轴(手腕旋转)
11.8N.m
B轴(手腕摆动)
9.8N.m
T轴(手腕回转)
5.9N.m
容许惯性力矩(GD2/4)
R轴(手腕旋转)
0.27kg.m2
B轴(手腕摆动)
0.27kg.m2
T轴(手腕回转)
0.06kg.m2
本体重量
120kg
电源容量*3
1.5kVA
*1: F=置地式 W=挂壁式 C=倒挂式 S=支架式 (挂壁式时,S轴的动作会有限制,请注意)
*2:JIS B 8432
*3: 因用途,动作模式而异
*4: 只限搬运用途