
目的・动作
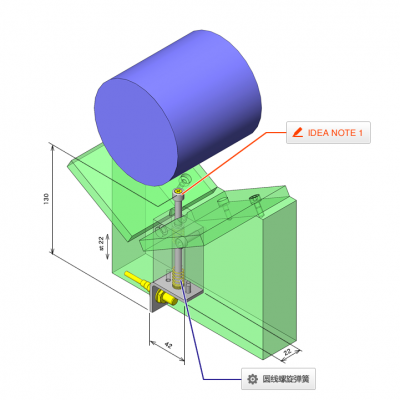
在V形工件支座上检测非磁性体圆柱形工件的就位情况时,移动接触工件的触头并通过接近传感器进行检测。
机器人将工件置于临时设置的V形座上,检测到工件。确认就位后,手动将工件转移到下一工序。未检测到工件时,机器人会搬运下一工件。
环境·操作性
固定工件后,移动触头,通过接近传感器使工件就位。
对象工件
圆柱
材质:铝合金
外形:φ100×100mm
重量:2.1kg
 新闻中心 新闻中心
联系方式站内搜索 荣誉资质
友情链接
|
非磁性体圆柱形工件检测结构(SolidWorks设计,Sldprt/Sldasm格式)
2023-11-29231828.22M
目的・动作 |